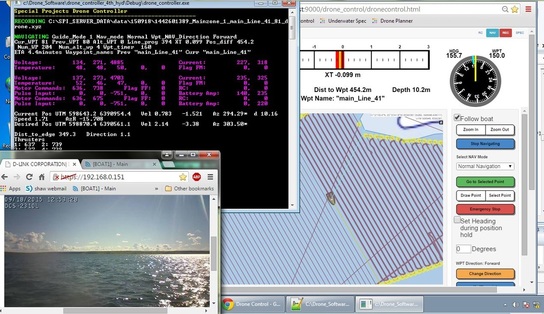
The Special Projects autonomous surface vessels have been designed for multi role applications. This one was designed to survey the entire lake area for depth and later sample the bottom chemistry using a custom sensor deployed on a winch. The application required a vehicle which could drive continuously for 8 or more hours at a time covering the nearly 30 square km lake with tight line spacing. In this mode it could be operated either fully autonomously with remote monitoring or optionally piloted where radio communication is not possible. In either case the pilot is only required to monitor and in many cases only commands the vehicle twice in a day, at the start and end. The second part of the requirement was for the boat to visit a set of predefined points on the lake stopping and holding the position while the on board operator controlled the sampling sensor and winch. The requirement for the application was the boat must maintain an absolute position within 10cm to prevent the sensor from dragging. This an example of the synergy between the operator and the ASV. The operators task load is minimized by not having to control the boat and continuously adapt to changing conditions. The operator simply clicks the next waypoint when ready and the boat repositions.
The Alternative
Is this you? Have you tried steering a boat while watching a computer in a cardboard box. Have you tried doing it 8 hours a day 7 days a week. Its not easy and results can be poor.
Applications
Driver assist or replacement for surveying
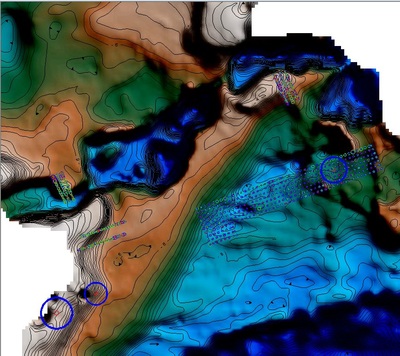
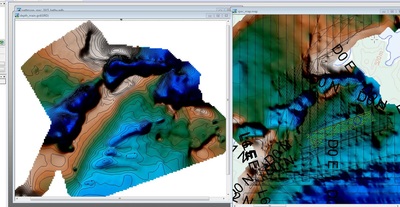
Shallow water bathymetry with tight spacing
Environmental sampling
In this operation the survey area was nearly 1 hour from base so the ASV tows its own tender for shore excursions or emergencies. Of course the ASV can tow its operator/babysitter too.
Features
Line following and position holding
2 m/s top speed
High Thrust, will easily pull other boats while staying on line.
9 hours continuous runtime from 24L fuel tank
AC/DC power provided by generator drives motors, computers, onboard sensors and anything else.
Motors are off the shelf 24V trolling motors so they are easy to replace or repair
Web interface, RC control, joystick control
Point and click navigation
Sensor integration
Optionally piloted, remotely piloted, fully autonomous, drive by wire
Small enough to be trailered, lifted by small crane or helicopter
Drives in 2ft of water (carefully)
Route Planning
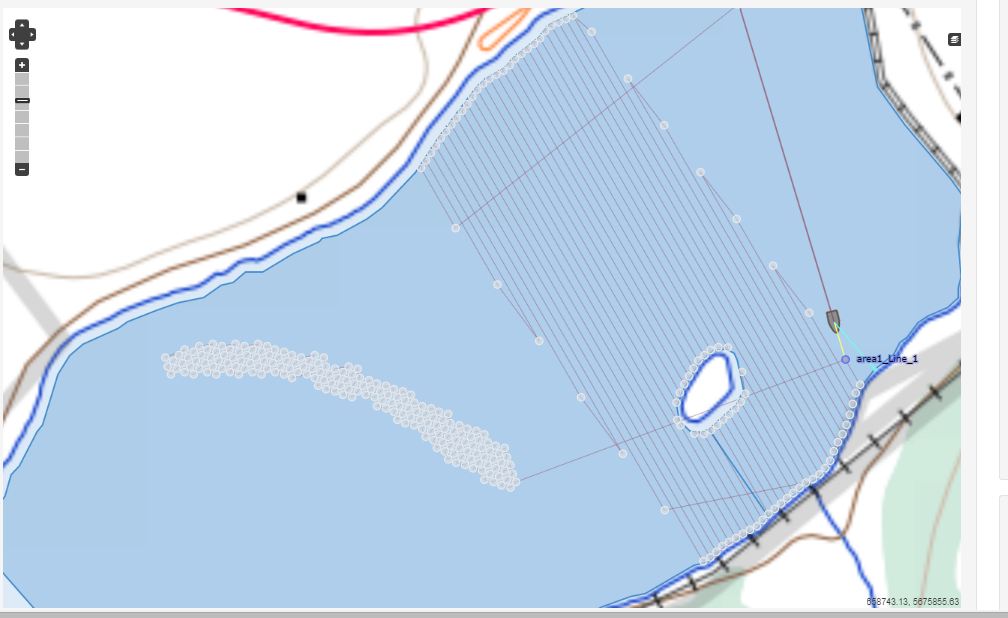
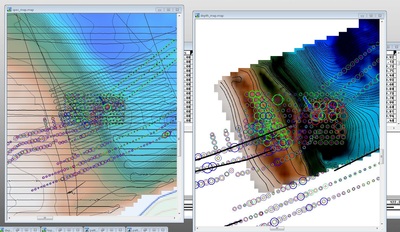
Planner software specific to the needs of water borne vehicles. A major component is defining the lake boundary. Smart offset and clipping algorithms are used to generate survey paths which minimize the total distance traveled which is more critical on slow moving vehicles. The planner can generate point grids as well as paths. In both cases minimizing the total distance travelled.
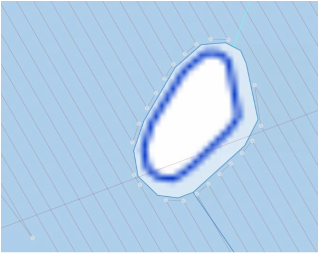
Route Plan Optimization: Unlike an airplane the boat must strictly enforce a no drive zone. These are defined in planner and route plans are optimized to reduce overall travel distance and minimize time spent driving around shore.
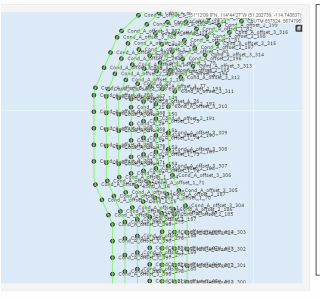
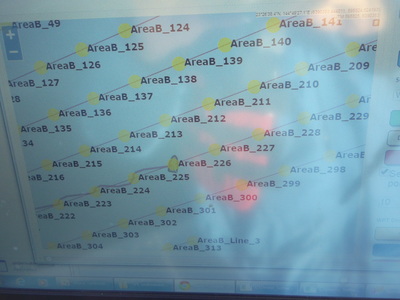
Stopping Points: The planner can generate points at predefined spacing along a path so the boat can stop and hold at each.